WPILib Kurulumu: 2027 sezonundan itibaren gerekli önkoşullar: Windows 11 (64 bit), Ubuntu 22.04 veya 24.04 (64 bit) ve macOS 13.3 veya üzeri. GitHub üzerinden indirme sayfasına gidin ve "latest" sürümünün downloads bölümünden uygun bağlantıya tıklayın.
Windows: Disk görüntüsüne sağ tıklayıp "mount" seçin, kurulum dosyasını başlatın. MacOS: İndirilen dosyaya çift tıklayarak WPILibInstaller'ı başlatın. Linux: Dosyayı çıkardıktan sonra ./WPILibInstaller komutuyla çalıştırın.
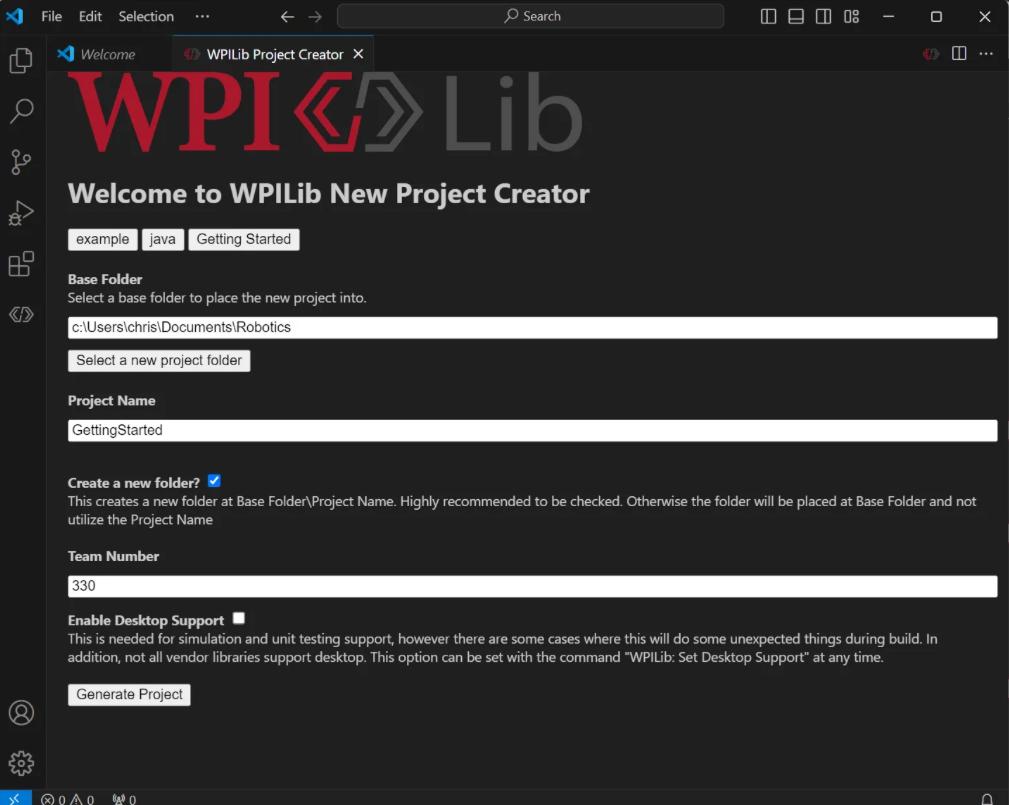
Kurulumda "Sadece bu bilgisayar için indir" seçeneğini seçin. WPILib, kendi VS Code sürümünü kullanmanızı önerir. İndirme tamamlandığında "İleri" tıklayın.